Naukowcy z całego świata zaczynają tworzyć roboty, które mogą dostosowywać swoją morfologię i zachowanie na żądanie. Zmieniając kształt ciała i sposób, w jaki się porusza, robot zmieniający kształt może obsługiwać szerszy zakres funkcji lub środowisk niż byłoby to możliwe w przypadku stałej lub sztywnej konstrukcji.
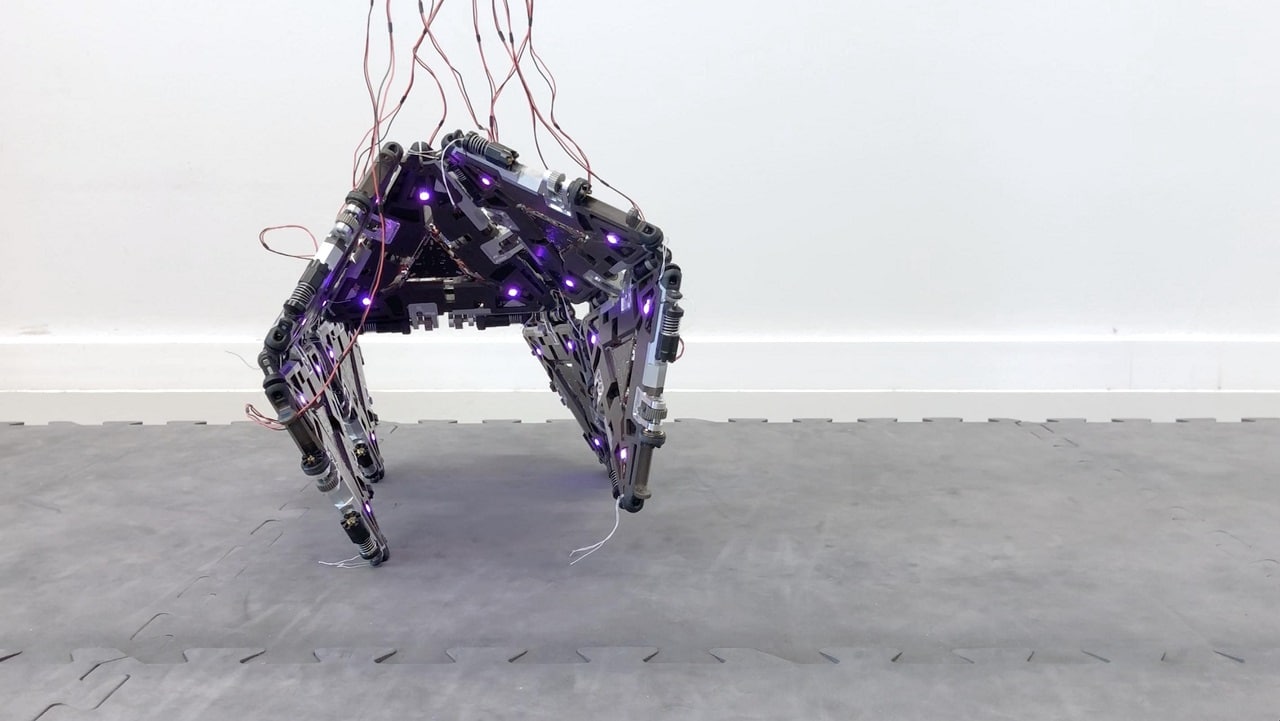
Naukowcy z EPFL School of Engineering stworzyli robota przypominającego origami, który może zmieniać kształt, poruszać się i wchodzić w interakcje z przedmiotami i ludźmi.
Robot Mori3 łączy w sobie inspiracje cyfrowym światem siatek wielokątów oraz biologicznym światem zachowań roju, dzięki czemu robot może przekształcić się z dwuwymiarowych trójkątów w niemal dowolny trójwymiarowy obiekt. Badania pokazują, że modułowe roboty do podróży kosmicznych są obiecujące.
„Naszym celem w przypadku Mori3 jest stworzenie modułowego robota przypominającego origami, którego można dowolnie montować i demontować w zależności od środowiska i wykonywanego zadania” mówi Jimmy Pike, dyrektor Reconfigurable Robotics Lab. Mori3 może zmieniać swój rozmiar, kształt i funkcję.
Robot Mori3 składa się z trójkątnych modułów, które można łatwo łączyć ze sobą, tworząc wielokąty o różnych rozmiarach i konfiguracjach w procesie znanym jako siatka wielokątów. Zespół osiąga to poprzez przesuwanie granic różnych aspektów projektowania robotyki, w tym projektowania systemów mechanicznych, elektronicznych i komputerowych.
„Musieliśmy przemyśleć sposób, w jaki rozumiemy roboty” wyjaśnia Christoph Belk, doktor habilitowany w dziedzinie robotyki. „Roboty te mogą zmieniać kształt, łączyć się ze sobą, komunikować się i rekonfigurować, tworząc funkcjonalne i przegubowe struktury”.
Według naukowców weryfikacja koncepcji zakończyła się sukcesem, ponieważ zmiennokształtne roboty Mori3 są dobre w trzech rzeczach – poruszaniu się o własnych siłach, interakcji z użytkownikami oraz manipulowaniu i przesuwaniu obiektów.
Wielokątne i polimorficzne roboty, które łączą się ze sobą, mogą być wykorzystywane do efektywnego tworzenia struktur przegubowych do szerokiej gamy zastosowań. mówi Pik. „Oczywiście wielofunkcyjny bot, taki jak Mori3, będzie mniej skuteczny niż boty specjalizujące się w określonych obszarach. Jednak największą zaletą Mori3 jest jego wszechstronność.”
Zmiennokształtny robot Mori3 został stworzony tak, aby pasował do statku kosmicznego, który nie miał miejsca na przechowywanie różnych robotów dla każdej indywidualnej misji, którą należało wykonać. Zespół ma również nadzieję, że roboty będą mogły być wykorzystywane do celów komunikacyjnych i napraw na zewnątrz.
Odniesienie do czasopisma:
- Christoph H. Bilk, Kevin Holdcroft, Alexander Siegrist i Jimmy Pike. Elastyczność morfologiczna w systemach zautomatyzowanych dzięki fizycznej sieci wielokątów. Inteligencja maszyn natury, 2023; DOI: 10.1038 / s42256-023-00676-8

„Analityk. Nieuleczalny nerd z bekonu. Przedsiębiorca. Oddany pisarz. Wielokrotnie nagradzany alkoholowy ninja. Subtelnie czarujący czytelnik.”

